Traje de Instrucción como medio de evaluación en el Sistema Táctico Básico Policial
Instruction Suit as a Means of Evaluation in the Basic Tactical Police System
Traje de Instrução como Meio de Avaliação no Sistema Tático Básico Policial
Jorge Hernando Ruiz Otálora a,* | Carolina Barrera Jiménez b | José Luis Garzón Santos c | Harlinzo Hernán Ávila Bermeo d | Jorge Luis Berrio Pino e | Wilmar Alberto Ospina Díaz f
a https://orcid.org/0000-0003-2214-3558 Policía Nacional de Colombia
b https://orcid.org/0000-0002-2472-1123 Policía Nacional de Colombia
c https://orcid.org/0000-0001-8037-4560 Policía Nacional de Colombia
d https://orcid.org/0000-0001-8451-0750 Policía Nacional de Colombia
e https://orcid.org/0000-0002-4890-8080 Policía Nacional de Colombia
f https://orcid.org/0000-0002-9762-6995 Policía Nacional de Colombia
- Fecha de recepción: 2021-11-03
- Fecha concepto de evaluación: 2021-11-22
- Fecha de aprobación: 2021-11-28
https://doi.org/10.22335/rlct.v14i1.1518
Para citar este artículo / To reference this article / Para citar este artigo: Ruiz Otálora, J. H., Barrera Jiménez, C., Garzón Santos, J. L., Ávila Bermeo, H. H., Berrio Pino, J. L., & Ospina Díaz, W. A. (2021). Traje de Instrucción como medio de evaluación en el Sistema Táctico Básico Policial. Revista Logos Ciencia & Tecnología, 14(1), 57-74. https://doi.org/10.22335/rlct.v14i1.1519
* Autor de correspondencia. Correo electrónico: estic.inves@policia.gov.co
Resumen
El ejercicio de la actividad de policía asociada al uso de los elementos coercitivos para la aplicación de la fuerza exige un alto nivel de entrenamiento que debe ser evaluado objetivamente para minimizar el riesgo de afectaciones causadas por eventuales desaciertos en el actuar de los uniformados hacia los ciudadanos. El problema referido anteriormente permite una formulación y solución fundamentada en la elaboración de un prototipo de traje para instrucción en la aplicación del bastón policial, como una propuesta enmarcada desde innovación tecnológica, con un producto que mejora la evaluación de los apliques de bastón tipo tonfa que realizan los policías durante su entrenamiento. Se provee una herramienta didáctica útil soportada en tecnologías disponibles en el mercado colombiano, para tecnificar los procedimientos de valoración hechos por los instructores durante las pruebas de manipulación del bastón policial que deben ser realizado por los funcionarios en su proceso de formación.
Palabras clave: Apliques, bastón, tonfa, evaluación policia, traje
Abstract
The exercise of the police activity associated with the use of coercive elements for the application of force requires a high level of training that must be objectively evaluated in order to minimize the risk of damages caused by eventual mistakes in the actions of the uniformed officers towards the citizens. The above-mentioned problem allows the formulation of a solution based on the development of a suit prototype for the instruction in the application of the police baton that is framed as a technological innovation proposal with a product that improves the evaluation of the tonfa baton sconces that police officers perform during their training, incorporating a useful didactic tool supported by technologies available in the Colombian market that technifies the assessment procedures to be performed by instructors during the baton manipulation tests that officers perform during their training process.
Keywords: Sconces, baton, tonfa, police evaluation, costume, suit
Resumo
O exercício da actividade policial associada à utilização de elementos coercivos para a aplicação da força requer um elevado nível de formação que deve ser avaliado objetivamente para minimizar o risco de danos causados por possíveis erros nas acções dos agentes uniformizados em relação aos cidadãos. O problema acima referido permite a formulação de uma solução baseada no desenvolvimento de um fato protótipo para instrução na aplicação do bastão de polícia, que é enquadrado como uma proposta de inovação tecnológica com um produto que melhora a avaliação da aplicação do bastão de tonfa pelos policias durante a sua formação, incorporando uma ferramenta didáctica útil apoiada nas tecnologias disponíveis no mercado colombiano que tecnifica os procedimentos de avaliação que os instrutores devem realizar durante os testes de manuseamento do bastão de polícia realizados pelos agentes durante o seu processo de formação.
Palavras-chave: Apliques, bastão, tonfa, avaliação policial, fantasia
Para precisar el objeto de estudio se realizó la revisión de la normatividad colombiana al respecto, identificándose la Ley 1015 de 2006, que dicta el régimen disciplinario para la Policía Nacional, donde se establece como falta gravísima cuando el funcionario de policía causa daño a la integridad de un tercero como consecuencia del uso de las armas, de la fuerza o de los demás medios coercitivos, entre los que se encuentra el bastón policial tipo tonfa (Congreso de la República de Colombia, 2006). Respecto al uso de la fuerza por parte de los funcionarios de policía, la Ley 1801 de 2016 (Congreso de la República de Colombia, 2016) establece en el artículo 22 que corresponde de manera exclusiva a los miembros uniformados de la Policía Nacional; complementariamente, el artículo 167 menciona que los uniformados pueden utilizar como apoyo medios de carácter técnico, tecnológico o de otra naturaleza que estén a su alcance, y tratándose de aquellos que puedan afectar físicamente a las personas, se deben usar de manera proporcional, de acuerdo a la necesidad y la racionalidad de la circunstancia específica. También, en la Resolución 02903 de 2017, se normalizan los niveles de resistencia que asumen los ciudadanos durante un procedimiento policial, y se establece un modelo para el uso diferenciado de la fuerza que debe ser acatado por los funcionarios; el artículo 18 señala al bastón policial como un dispositivo de control auxiliar (Policía Nacional de Colombia, 2017).
Para ello, y dando una solución óptima en la utilización de este dispositivo (tonfa) se hizo necesario, la utilización de los microcontroladores siendo estos unos circuitos embebidos compuestos por una unidad central de procesamiento, osciladores, periféricos, unidades de memoria y puertos de salida y entrada, que funcionan en conjunto para cumplir funciones específicas previamente programadas. Su programación se fundamenta en lenguaje de máquina (binario, 1 y 0), demasiado complejo para programar directamente, lo cual justifica el uso de un lenguaje de bajo nivel mediante software assembler. De hecho, actualmente se emplean software de programación de medio nivel (C) y de alto nivel (C++), que facilitan aún más la tarea de escritura de código. Entre los dispositivos que emplean lenguaje de medio nivel se considera a
PIC C Compiler como uno de los más versátiles, teniendo en cuenta que además de su fácil programación en C también incluye un compilador que convierte el programa a lenguaje de máquina y posteriormente lo graba en la memoria del microcontrolador (Smelpro.com, 2019).Por su parte, Proteus es un software de diseño de circuitos electrónicos que incluye adicionalmente la simulación y el diseño de tarjeta de circuito impreso. Las etapas conocidas para el proceso de elaboración de un circuito
de control son: diseño de circuito electrónico, desarrollo del software de programación, simulación del circuito y del programa, ajustes identificados en la simulación, diseño del circuito impreso y, finalmente, construcción del prototipo físico (Labcenter , 2020). Método
MétodoLa investigación y el procedimiento definidos para abordar el problema tecnológico corresponden a una estrategia con un amplio componente práctico encaminado a innovar facilitando una solución para la necesidad identificada en el uso de la tonfa por parte de los uniformados.
Diseño de la investigación
De acuerdo con García (2005), esta investigación se categoriza como incremental, dado que en el alcance de la solución se emplea el conocimiento de los investigadores para desarrollar un prototipo con un sistema de funciones específicas aplicable como herramienta didáctica para evaluar a los funcionarios de policía en el uso del bastón.
Desde la perspectiva del Manual Frascati como referente internacional en actividades científicas, tecnológicas y de innovación, esta es una investigación de desarrollo experimental, por cuanto se ejecuta un trabajo sistemático de cara a la producción de un nuevo o mejorado producto tecnológico que apoya los procedimientos de formación de los policías frente al uso del bastón policial (OCDE, 2015).
Muestra
La muestra determinada para esta investigación es de tipo dirigido, por cuanto se seleccionan materiales y dispositivos existentes en el mercado tecnológico de Colombia para contrastar sus características técnicas y determinar su adecuación con los requerimientos funcionales del prototipo pretendido en este estudio.
Los dispositivos contrastados corresponden a microcontroladores, sensores y módulos inalámbricos de transmisión de datos.
Procedimiento de la investigación
Se establecieron cinco fases de ejecución, como método expedito para alcanzar la propuesta de innovación fundamentada en un prototipo funcional y escalable.
Fase 1: Concepción general de la solución
En esta fase se establecen los aspectos generales de funcionalidad y características físicas de prototipo, a partir de las observaciones y documentos allegados en la investigación, concretando un compendio de requerimientos funcionales en un diagrama de bloques que posibilita la concepción o selección de materiales y dispositivos tecnológicos para integrar el prototipo.
Fase 2: Selección de tecnologías y materiales
Realizada teniendo en cuenta la disponibilidad en el mercado colombiano, y la premisa de cumplimiento de los requerimientos y adaptabilidad entre los componentes, verificados mediante instrumentos de medición electrónicos y cálculos fundamentados en las fichas técnicas de los dispositivos.
Fase 3: Construcción de la electrónica
La tercera fase implica el diseño de la electrónica, en donde se incluyen los dispositivos y materiales seleccionados, validados mediante simulaciones y prototipado rápido, a fin de identificar adecuaciones o cambios que ajusten su funcionabilidad y el cumplimiento de los requerimientos del prototipo, finalizando con la construcción de los circuitos y los diagramas de conexión y ensamble con el componente estructural.
Fase 4: Ensamble de la estructura del prototipo
A partir del bosquejo preliminar de la totalidad de la estructura y la selección de materiales adecuados de manufactura para una fabricación ajustada a las necesidades del prototipo y su compatibilidad con el componente electrónico, se ejecutaron pruebas experimentales para evaluar las condiciones de resistencia y protección de amortiguamiento para apliques del bastón policial tipo tonfa.
Fase 5. Articulación del prototipo, pruebas y ajustes
La última fase incluye las actividades de integración y pruebas de compatibilidad entre los arreglos de electrónica y la estructura, validando la funcionalidad
de la totalidad del prototipo. Adicionalmente, se ejecutaron los ajustes necesarios para asegurar el normal
funcionamiento de los componentes y el total cumplimiento de los requerimientos.Recolección y análisis de los datos
Para la contextualización y formulación del problema de investigación y del marco referencial se hace uso de recolección documental y entrevistas abiertas para consolidar los datos necesarios que permiten comprender el objeto de estudio; adicionalmente, se ejecutan observaciones directas en el entorno donde se identifica la problemática, para contrastarlos con los hallazgos documentales.
El marco referencial involucra un cuestionario debidamente validado por el director de trabajo de grado, que se aplica mediante herramientas TIC a los sujetos involucrados en el objeto de estudio, que para este caso se concentra en los funcionarios de la Escuela Metropolitana de Bogotá (Esmeb).
También se emplean dispositivos electrónicos de medición que recogen datos asociados al funcionamiento de los dispositivos seleccionados para integrar el prototipo (multímetro, osciloscopio, cronómetro, cinta métrica, etc.) y en general de las condiciones de consumo de corriente, autonomía y distancia de conexión inalámbrica, entre otros aspectos referidos a los requerimientos establecidos en la fase inicial de desarrollo.
El análisis de los datos de contraste se realiza mediante arbitraje, por parte de los investigadores y de expertos en el campo de estudio (ingeniería electrónica y de telecomunicaciones), quienes analizan las características técnicas de los materiales y dispositivos concebidos para el prototipo.
ResultadosConcepción general de la solución
Durante la entrevista realizada con el señor Intendente Jefe Valbuena (Instructor de Sistema Táctico Básico ESMEB; entrevista hecha el 3 de febrero de 2021), experto en capacitación, se documentaron las siguientes necesidades y parámetros que se deben tener presente en la concepción de la solución:
Método empleado para las prácticas con tonfa
Se estableció que para la ejecución de la prueba el bastón se emplea para apliques de contacto (cuando
el funcionario hace uso del cuerpo lateral de la tonfa), empuje (se usa fuerza para empujar al adversario con
el cuerpo de la tonfa como barrera de contacto) y con la punta del cuerpo o mango principal.El experto confirmó además que la práctica debe estar guiada por instructores especializados y con experiencia, y que la ejecución de esta actividad implica previamente una instrucción teórica en la que se abordan temas varios sobre anatomía humana, legislación respecto del uso legítimo de la fuerza, manejo del estrés (respiración, posiciones), y por último se divulgan las reglas de la práctica, entre las que se incluye la forma de evaluación.
La práctica se divide en tres momentos, evaluados cualitativamente por el instructor, con un minuto para cada uno: el primer minuto es de asimilación, en el que el practicante se adecua a la situación simulada y los elementos utilizados; en el segundo minuto, de empuje, se ejecutan los ejercicios de fuerza sin que se involucren apliques contundentes con la tonfa, y en el tercer minuto, para el manejo de estrés se ejecutan acciones de fuerza y apliques de tonfa, acompañados de advertencias previas que debe emitir verbalmente el policía practicante, tales como “¡alto!, ¡policía!”, “¡deténgase!”, etc.
Durante la práctica solamente se realizan empujes y apliques de tonfa, sin involucrar llaves u otros movimientos defensivos u ofensivos, para lo cual se dispone de un espacio libre de 9 a 12 m2, y se involucran necesariamente tres instructores: principal, auxiliar y apoyo, siendo este último quien viste el traje RedMan, mientras que por su parte el instructor principal lidera la totalidad de la práctica y el instructor auxiliar es el que asiste en el proceso de evaluación.
Forma de evaluación propuesta para las prácticas
Actualmente, la evaluación se efectúa de manera cualitativa por parte del instructor principal, refiriéndose sobre todo a la actitud; sin embargo, el experto propone incorporar la siguiente valoración cuantitativa: calificación de 5 puntos para los apliques realizados en las zonas verdes, 4 puntos para los realizados en las zonas amarillas, 1 punto para los realizados en las zonas rojas, y descalificación si el funcionario ejecuta apliques en la ingle o la cabeza.
Consecuentemente, el resultado final de la evaluación cuantitativa corresponderá al promedio aritmético de la calificación para cada aplique durante la práctica.
Aspectos generales que ocurren con frecuencia durante la práctica
El experto puntualiza que, de acuerdo a su experiencia, los lugares donde menos suceden apliques con la tonfa son la cabeza y la ingle, pero sugiere que el lugar más seguro para la ubicación del circuito electrónico y las baterías debería ser la parte alta de la espalda, debajo de la nuca, debido a la mínima ocurrencia de apliques en esta zona, ya que el instructor auxiliar siempre se ubica frente al adversario, y descartando otras zonas de posible ubicación, como la ingle o la zona interna del pie, por cuanto pueden resultar incómodas o tienen mayor posibilidad de recibir apliques de tonfa.
Requerimientos funcionales
Teniendo en cuenta las descripciones anteriores por parte del experto sobre el método, forma de evaluación y aspectos generales para la ejecución de la práctica de apliques de tonfa, se procedió a establecer los requerimientos funcionales para el prototipo (tabla 1).
Tabla 1
Compendio de requerimientos para el prototipo
No.
Requerimiento
Especificaciones técnicas
1
El prototipo debe detectar los apliques efectuados con la tonfa según las zonas de impacto corporal clasificadas.
Se evalúan diferentes tipos de sensores, ubicados en las zonas de impacto del traje de protección, de modo que detecten el aplique enviando señales eléctricas interpretables por el componente electrónico.
2
El prototipo debe transmitir el dato de impacto a un módulo remoto, que ejecuta los cálculos matemáticos para calificar la práctica realizada por el discente.
Se plantean dos módulos, compuestos principalmente por arreglos de microcontroladores: el módulo principal se dispone en el traje para la interpretación de los puntos de impacto y su transmisión inalámbrica al módulo remoto, que se encarga de ejecutar los cálculos aritméticos y proporciona la interfaz con el usuario.
3
El prototipo debe tener capacidad de funcionamiento con medios recargables de almacenamiento de energía.
Cada uno de los módulos del componente electrónico debe incluir un arreglo de baterías recargables para posibilitar su funcionamiento durante 8 horas, en jornadas que comportan 10 prácticas de apliques de tonfa por cada hora, para un total de 80 prácticas por jornada.
4
El prototipo debe contar con una estructura que disminuya el eventual daño corporal causado por los apliques de tonfa.
Se pretende elaborar un prototipo de traje de protección con los materiales y manufactura disponibles en el mercado colombiano, incluyendo elementos que amortigüen el impacto de los apliques.
5
El prototipo debe otorgar el siguiente puntaje para cada zona corporal de impacto:
Roja: 1 punto.
Amarilla: 4 puntos.
Verde: 5 puntos.
El cálculo de puntaje final se ejecuta mediante el promedio aritmético de las calificaciones obtenidas durante el tiempo de prueba.
Desarrollo de un algoritmo de programación para el microcontrolador, vinculado al módulo remoto en el que se incluyen las variables y funciones necesarias para clasificar y acumular los puntajes de acuerdo con la información transmitida por los sensores.
El resultado de la evaluación se notifica al usuario mediante una pantalla LCD, a partir del promedio aritmético de los puntajes acumulados.
6
El prototipo debe descalificar al discente cuando se efectúe un aplique de tonfa en la ingle.
El algoritmo de programación debe evaluar constantemente la ocurrencia de impactos en la zona de la entrepierna, para lo cual el prototipo debe emitir mensajes auditivos y visuales de notificación al instructor sobre la descalificación.
7
El módulo remoto del prototipo debe contar una interfaz que muestre los resultados numéricos de la calificación, y permita al usuario determinar el momento de inicio y el final de la prueba, más una opción de reinicio y borrado del puntaje.
El módulo remoto incluye una pantalla LCD para mostrar los resultados de evaluación al instructor, además de pulsadores de señales interpretables por el microcontrolador y su algoritmo, para que el instructor pueda notificar el inicio y la finalización de la práctica, así como hacer el reinicio y borrado de puntaje.
8
La estructura externa del traje de protección debe ser de color rojo.
El material seleccionado para la manufactura del traje de protección se caracteriza por su color rojo, la resistencia a impactos y la integración de medios físicos de amortiguación que minimicen las posibles lesiones al instructor que viste el traje durante la práctica.
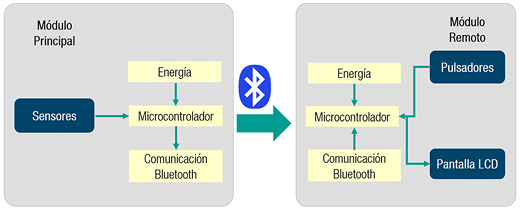
Desde estos ocho requerimientos funcionales para el prototipo se determinó el siguiente concepto de diseño, basado en diagrama de bloques (figura 1).
El concepto para el componente electrónico del prototipo incorpora dos módulos: el principal, integrado en el traje de protección y gobernado por microcontroladores que reciben e interpretan las señales provenientes de los sensores instalados en las zonas de impacto del traje, con un bloque de energía que sustenta todo el funcionamiento del módulo, compuesto por un arreglo de baterías y sus respectivos medios de recarga. El protocolo bluetooth proporciona el medio inalámbrico para transmitir la información desde el módulo principal hacia el remoto.
Figura 1
Diagrama de bloques preliminar
Este módulo remoto también involucra un microcontrolador que recibe la información vía bluetooth, la interpreta y organiza, y ejecuta las operaciones aritméticas para determinar el puntaje de evaluación, mostrándolo al usuario en una pantalla LCD; adicionalmente incluye un arreglo de pulsadores, para que el mismo usuario interactúe con el prototipo.
Para el diseño del traje de protección se tienen en cuenta empresas de manufactura colombiana y la disponibilidad de los materiales que manejan en esta industria (Innotex, 2020), por lo que se definió que este prototipo de traje se apoyara en los diseños preexistentes de trajes de protección de motocicleta, replanteando las tallas, protecciones incorporadas y colores característicos, para adecuarlos a los requerimientos funcionales planteados en este proyecto de investigación.
La ubicación de los sensores se establece de acuerdo con las zonas de impacto (verde, amarilla, roja) clasificadas en la etapa de documentación.
Selección de tecnologías y materiales
La selección de materiales y dispositivos se realizó mediante comparación documental, con la validación del experto asignado por la Escuela de Tecnologías de la Información y las Comunicaciones como director de esta actividad.
A continuación (tabla 2), se sintetiza el proceso de selección de los dispositivos y materiales de mayor relevancia para el adecuado funcionamiento del prototipo, los cuales se hallaron en el mercado electrónico de la ciudad de Bogotá, junto con las comparaciones de funcionalidad y adaptabilidad requeridas para el prototipo.
Tabla 2
Comparativo opciones de sensor de apliques de tonfa
Equipo material
Opción 1
Opción 2
Opción 3
Transductor
de apliques TonfaPulsador plano
Sensor piezoeléctrico
Sensor capacitivo
Cierra un contacto al momento de ser obturado, pero sus dimensiones dificultan la integración con el traje de protección.
Decisión: Inviable
Genera un voltaje proporcional cuando recibe una presión instantánea sobre su superficie de cuarzo. Su espesor de 1 mm facilita la integración con el traje de protección.
Decisión: Viable
Detecta cercanía de elementos sin necesidad de contacto físico, pero su protección no es posible porque debe estar expuesto para no afectar su funcionalidad. Además, su longitud dificulta la ubicación.
Decisión: Inviable
Equipo material
Opción 1
Opción 2
Opción 3
Cableado
de conexiónCable dúplex calibre 22
Alambre multipar
Cable Ribbon
Su uso implica una tira de cable por cada sensor, resultando en una cantidad importante de cableado y empalmes al interior del traje, lo que afecta su funcionalidad y dificulta su adaptabilidad.
Decisión: Inviable
Suministra múltiples pares que pueden disminuir el cableado en el traje, pero su diámetro y rigidez afectan su adaptabilidad para el prototipo, además de que los empalmes o junturas se afectarían con el movimiento.
Decisión: Inviable
Tiene la ventaja de ser flexible y de menor diámetro, con configuraciones hasta de 40 hilos, proporcionando la mejor adaptabilidad para el prototipo.
Decisión: Viable
Material del traje
de protecciónLona Reebag
Tela impermeable (laminado
de poliuretano)Tela nylon
Impermeable, alta resistencia a abrasiones y rasgaduras, empleada en traje de protección de caídas en motociclismo.
Decisión: Viable
Impermeable, resistencia mínima a abrasiones y rasgaduras, empleada en traje para protección de ambientes húmedos.
Decisión: Inviable
Semi-impermeable, resistencia media a abrasiones y rasgaduras, empleada en prendas de vestir y protecciones para electrodomésticos.
Decisión: Inviable
Establecido el uso de sensores piezoeléctricos para la detección de los apliques de tonfa, se procedió a determinar su distribución en cada una de las 29 zonas corporales que se describen a continuación (tabla 3). En total se emplean 91 sensores en agrupaciones de 2 hasta 6, conectados en paralelo en cada punto corporal específico, como método para ampliar la cobertura del área.
La posición del circuito electrónico que concentra las señales desde los sensores y transmite los datos inalámbricamente se ubica en la parte alta y central de la espalda como se observa en la figura 2.
Tabla 3
Puntos corporales determinados para ubicación de sensores
No.
Punto
Cantidad de sensores conectados en paralelo
1
Gemelo izquierdo
2
2
Muslo trasero izquierdo
2
3
Gemelo derecho
2
4
Muslo trasero derecho
2
5
Glúteo izquierdo
2
No.
Punto
Cantidad de sensores conectados en paralelo
6
Glúteo derecho
2
7
Pierna izquierda
6
8
Rodilla izquierda
2
9
Muslo delantero externo izquierdo
3
10
Muslo delantero centro
izquierdo3
11
Testículos
2
12
Pierna derecha
6
13
Rodilla derecha
2
14
Muslo delantero externo derecho
3
15
Muslo delantero centro derecho
3
16
Abdomen izquierdo
4
17
Abdomen derecho
4
18
Pecho izquierdo
2
19
Pecho derecho
3
20
Hombro izquierdo
2
21
Hombro derecho
2
22
Antebrazo izquierdo
6
No.
Punto
Cantidad de sensores conectados en paralelo
23
Antebrazo derecho
6
24
Codo izquierdo
2
25
Codo derecho
2
26
Brazo izquierdo
5
27
Brazo derecho
5
28
Espalda izquierda
3
29
Espalda derecha
3
Total
29 puntos corporales
diferenciados91 sensores
piezoeléctricosFigura 2
Distribución sensores piezoeléctricos en las zonas corporales del prototipo
Los puntos corporales establecidos permiten seccionar las zonas de impacto teniendo en cuenta la parte del cuerpo humano, lo cual mejora las posibilidades de calificación pretendidas por el prototipo, por cuanto se conoce con mayor detalle el punto impactado.
Construcción de la electrónicaLa distribución de puntos corporales constituye el punto de partida para el diseño del circuito electrónico final y la lógica de programación. Adicionalmente, se procedió a realizar la caracterización de los niveles de voltaje emitidos por los sensores cuando reciben un impacto con el bastón, con una chaqueta de protección fabricada con los mismos materiales definidos para el prototipo, a la que se le incorporaron dos sensores piezoeléctricos en una de la protección ubicada en el brazo derecho.
Luego uno de los investigadores vistió la chaqueta y se conectaron los sensores en paralelo mediante conductores eléctricos a un osciloscopio, procediendo a ejecutar impacto contundente con un bastón policial tipo tonfa recubierto con poliuretano expandido, para documentar los resultados de las señales de voltaje en el osciloscopio.
Durante el procedimiento se efectuaron impactos variados con fuerza aleatoria, logrando caracterizar las señales de voltaje generadas en el osciloscopio. Los resultados muestran que la señal generada tiene un valor medio cercano a los 32 V, con una variación en el tiempo en el rango de los 20 y 30 ms.
Teniendo en cuenta que el voltaje máximo que recibe un pin del microcontrolador es de 5 V, se determinó la necesidad de diseñar un circuito divisor de voltaje que además suprima los picos negativos de la señal.
Previendo posibles picos máximos, se determinó un valor superior de 34 V pico a pico, y por lo tanto un voltaje pico (positivo) de 17 V como valor máximo para los cálculos del divisor de voltaje. Adicionalmente se configura el conversor análogo digital con una resolución de 10 bit, lo cual implica que el rango de voltaje de referencia asumido (4.7 voltios) se divide en 1.024 partes, dando como resultado 4.589 mV, que se asume como el voltaje mínimo que podría detectar el microcontrolador.
Para determinar la correspondencia entre el voltaje emitido por el sensor y el que ingresa al microcontrolador, se establece su relación así:


Este resultado permite establecer que las resistencias en el divisor de voltaje deben mantener dicha relación de 3.61:1 aproximadamente, además de que el voltaje mínimo detectado en el sensor viene dado por el producto entre el voltaje mínimo detectable del conversor análogo-digital del microcontrolador y la relación obtenida, así:

Para determinar la resistencia total del circuito divisor se asume un valor por debajo de la corriente máxima permitida al ingreso del microcontrolador, que para este caso sería de 4.5 mA, en la siguiente fórmula:


Con este valor se calcula la eventual corriente mínima que puede circular por el divisor de voltaje:


En la tabla 4 se agrupan los valores calculados para el divisor de voltaje:
Tabla 4
Valores calculados para el diseño del divisor de voltaje
Característica
Valor
Voltaje máximo de entrada
17 V
Corriente máxima de entrada
4.5 mA
Voltaje mínimo de entrada detectable
0.01656933 V
Corriente mínima de entrada
4.3860 μA
Resistencia total
3777.7 Ω
Relación entre voltajes de entrada y salida
3.61:1
A continuación, se procede a establecer los valores de las dos resistencias que conforman el divisor de voltaje.


Entonces R2 viene dada por:


Con el propósito de ajustar el diseño del circuito a los valores de resistencia comerciales, se aproxima R2 a
los 2.700 Ω, mientras que para R1 se determina la conformación de un arreglo de tres resistencias, conectando dos en serie (de 1 KΩ y 3.3 MΩ) y a su vez en paralelo con una resistencia de 1 KΩ, lo que en conjunto equivale a una resistencia de 999.6971532 Ω; este arreglo de resistencias se conectó en serie con R2, de modo que la resistencia total equivale a 3699.6971532 Ω. Los valores definitivos del circuito divisor de voltaje se encuentran en la tabla 5.Tabla 5
Valores definitivos del divisor de voltaje
Característica
Valor
Voltaje máximo de entrada
17 V
Corriente máxima de entrada
4.594 mA
Voltaje mínimo de entrada detectable
0.01656933 V
Corriente mínima de entrada
4.4785 μA
Característica
Valor
Resistencia total
3699.6971532 Ω
Resistencia R1: (arreglo serie-paralelo de tres resistencias R3 y R4 de 1 KΩ y R150 de 3.3 KΩ)
999.6971532 Ω
Resistencia R2
2700 Ω
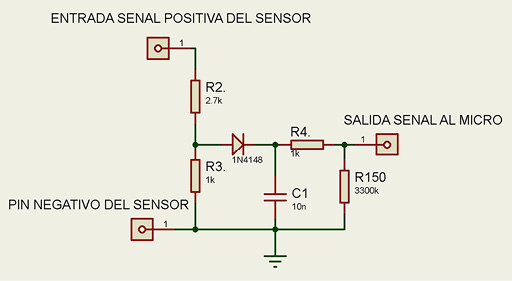
El arreglo de resistencias en serie-paralelo que conforman a R1 tiene el propósito de mejorar la protección contra eventuales sobre corrientes del pin de entrada en el microcontrolador, para lo cual se realizaron pruebas en laboratorio confirmando su funcionalidad. El diodo 1N4148 incorporado en la entrada se encarga de impedir el paso de los picos negativos de voltaje y el condensador C1 de 10 nF apoya el filtrado de corrientes alternas parásitas; el circuito resultante del divisor de voltaje se aprecia en la figura 3.
Figura 3
Circuito divisor de voltaje final para el prototipo
De acuerdo a lo anterior, se puede establecer que cuando el voltaje de entrada es máximo, en R2 aparecen 12.4038 V, mientras que el voltaje restante (4.5962 V) aparece en el nodo donde se une el ánodo del diodo 1N4148. Entonces la corriente que circula entre R4 y R150 (donde se toma la señal que percibe el microcontrolador) sería:

Una vez determinado el circuito divisor de voltaje, se procedió a seleccionar un microcontrolador disponible en el mercado con las siguientes especificaciones para el control electrónico del prototipo:
- Oscilador interno miniatura programable por software, de mínimo 50 KHz
- 29 canales/pines de conversión análogo-digital (A/D)
- Un puerto de comunicación RS-232
- Resolución del conversor de al menos 10 bits
- Voltaje de operación entre 2.0 y 5.5 V
- Memoria de datos SRAM de 256 bytes
- Memoria de datos EEPROM de 256 bytes
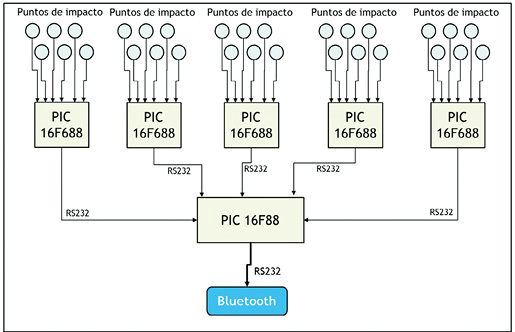
Esta búsqueda se realizó con el apoyo de la aplicación PICmicro Database, disponible para sistema operativo Android, la cual comprobó que no se dispone de un microcontrolador con la cantidad de canales A/D requeridos. Por este motivo se definió que se empleara un arreglo de varios microcontroladores de referencia PIC16F688, para recibir las señales de los sensores, interpretarlas y transmitir (por puerto RS-232) un dato representativo.
La selección del PIC16F688 obedece a que cuenta con 8 canales de conversión A/D correspondientes a la mayoría de sus 14 pines, además de que cumple con requerimientos de voltaje de trabajo, oscilador interno, puerto de comunicación RS-232, resolución de conversión A/D y memoria requerida (Microchip, 2021).
La señal transmitida por el puerto RS-232 de cada microcontrolador es recibida por un microcontrolador central PIC16F88, que concentra los datos y procede a retrasmitirlos vía inalámbrica mediante bluetooth hacia el módulo remoto.
El PIC16F88 se selecciona teniendo en cuenta que tiene 18 pines, suficientes para la configuración de los cinco puertos RS-232 virtuales; también incluye un puerto dedicado RS-232, para la conexión inalámbrica de datos (bluetooth), y un oscilador interno configurable por software, con un voltaje de trabajo de 2 a 5.5 V DC (Microchip, 2005).
Los datos de los sensores que conforman los puntos de impacto y los que manejan los microcontroladores PIC16F688 son de tipo análogo, mientras que los datos transmitidos desde estos hasta el PIC16F88 son caracteres asociados arbitrariamente y retransmitidos hacia el módulo remoto.
Figura 4
Diagrama conexión de microcontroladores en el módulo principal
Prototipado rápido del divisor de voltaje
Para confirmar la funcionalidad del circuito diseñado, se ensambló en protoboard de acuerdo al plano electrónico ver (figura 5), que incluye la totalidad de las conexiones de programación y alimentación eléctrica para el microcontrolador PIC16F688 y las seis entradas análogas que debe soportar.
El programa elaborado para el microcontrolador incluye la rutina y las variables necesarias para la lectura de los canales análogos y la conversión digital de la señal recibida. Seguidamente se incluyó un condicional IF, que evalúa el valor digital activando el LED si este valor se encuentra en el rango de números binarios entre 50 a 1.024, descartando de esta manera los niveles menores a 50 en los que se encuentran normalmente los picos de voltajes asociados a ruido eléctrico. El oscilador se programó para trabajar en una frecuencia de 4 MHz, con una resolución del conversor de 10 bits y 12 variables tipo flotante más una de tipo entero.
El circuito se conectó a un arreglo de seis sensores piezoeléctricos instalados en la estructura del prototipo, procediendo a energizarlo y ejecutar las pruebas de impacto con la tonfa y con los debidos materiales de protección y amortiguamiento predefinidos en la estructura del traje, encontrando que los niveles de sensibilidad en los sensores se adecuan a lo presupuestado.
Durante esta actividad se ejecutaron múltiples pruebas de impactos con un alto nivel de fuerza aplicada, monitoreando con osciloscopio el comportamiento de la señal de voltaje a la entrada del microcontrolador, evidenciando voltajes de hasta 2.84 V, lo que confirma que en ningún caso se sobrepasó el voltaje de referencia de 4.7 V. También se confirmó que las variaciones de voltaje presentes en la señal mientras no se ejecutan apliques de tonfa son efectivamente omitidos y no se generan falsas lecturas.
Electrónica del módulo principal
Posteriormente a las pruebas y la validación del divisor de voltaje se concretó el diseño final del circuito para el
módulo principal, incluyendo los cinco microcontroladores PIC16F688 y el microcontrolador PIC16F88 que recibe los datos y los retransmite inalámbricamente al módulo remoto.En la distribución de puertos para los PIC16F688 se destaca que los pines de programación en línea con el circuito (PGD, PGC) se destinan exclusivamente para el procedimiento de programación del microcontrolador; por otra parte, el pin A5 controla el encendido de un LED que se emplea para la verificación del funcionamiento del programa, mientras que los pines C4 y C5 corresponden al puerto RS-232 y la mayoría de los pines análogos (A4, C3, A2, C0, C1 y C2) se destinan a la recepción de los datos de los sensores.
Para el caso del PIC16F88, la programación debe realizarse mediante la extracción de microcontrolador, por cuanto el dispositivo no tiene disponible esta funcionalidad. También se incluye un LED controlado por el pin B4, que se utiliza en las actividades de prueba del circuito. Los pines B2 y B5 se dedican para el puerto RS-232, en el que se conecta el enlace inalámbrico que transmite los datos al módulo remoto.
Los transceptores seleccionados para la comunicación inalámbrica son módulos bluetooth HC-05, con un voltaje de trabajo de 5 V DC, que se configuran mediante comandos AT para establecer una conexión punto a punto compatible con el protocolo RS-232, con una tasa de 4.800 baudios, sin bit de paridad ni de parada.
A continuación, se realizó el diagrama de flujo que describe la programación para los cinco microcontroladores PIC16F688, los cuales reciben las señales análogas provenientes de los sensores.
El ciclo continuo del programa inicia con la lectura de los seis canales análogos que reciben las señales de los sensores, asociados a la misma cantidad de zonas corporales; a continuación, se observa un arreglo sistemático de seis sentencias condicionales IF, que evalúan el dato digital captado en cada uno de los canales, procediendo a enviar el carácter que corresponde con la zona si se cumple la condición de estar en el rango entre 50 y 1023.
El programa para el microcontrolador PIC16F88, que recibe los datos de los cinco PIC16F688 y los reenvía al módulo remoto a través del bloque de comunicación bluetooth, inicia con la activación de los puertos virtuales RS-232 y del puerto nativo RS-232. Posteriormente, en el ciclo continuo se encuentran seis arreglos de condicionales IF, que evalúan sistemáticamente si llegó un dato en cada uno de los cinco puertos virtuales para proceder a reenviarlo por el puerto nativo denominado BLE.
Electrónica del módulo remoto
El diseño electrónico del módulo remoto implica un microcontrolador PIC16F88, el cual cuenta con los pines necesarios para la gestión de la pantalla LCD 16x2, la recepción del estado de los dos pulsadores que sirven como interfaz para el usuario, el control de un LED y la recepción de datos a través del puerto RS-232 nativo.
Los pines A0, A1, A2, A3, A4, A6 y A7 se destinaron a la gestión de la pantalla LCD, mientras que los pines B0 y B1 reciben el estado de los pulsadores de reset y de inicio-fin que obtura el usuario. Como pines de salida se determinó el B3 para el control del LED indicador de encendido, el pin B4 para gestionar un buzzer de notificación auditiva de los estados de la prueba (iniciando, descalificado), y finalmente, los pines B2 y B5, que corresponden a recepción y trasmisión para el puerto RS-232, a donde llegan los datos desde el bloque de bluetooth.
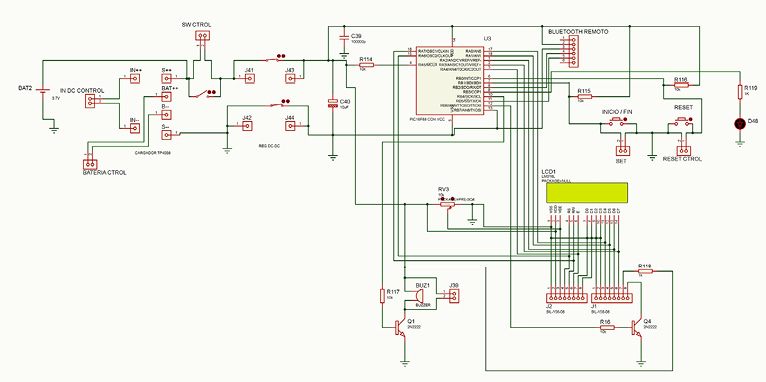
En la figura 5 se muestra el diagrama electrónico final del módulo remoto donde se observan las conexiones entre los diferentes componentes.
En la parte izquierda del diagrama se observan los conectores requeridos para la conexión del bloque de energía, un arreglo electrónico TP4056 que gestiona la descarga y recarga de la batería de ion de litio que alimenta la totalidad del circuito; adicionalmente se encuentran los conectores para integrar el arreglo electrónico del convertidor DC-DC elevador SX1308, el cual se encarga de elevar el voltaje de salida a 5 V DC, requeridos para el funcionamiento del microcontrolador y el bloque de comunicación HC-05.
Los condensadores C39 y C40 se destinan a la rectificación de los eventuales rizados presentes en el voltaje de alimentación, la resistencia R114 (10 KΩ) mantiene en estado alto el pin de master clear del microcontrolador, y las resistencias R115 y R116 de 10 KΩ cada una, mantienen en estado alto a los pines B0 y B1, que pasan a estado bajo cuando se obtura el pulsador correspondiente.
La resistencia R119 (1 KΩ) limita el paso de corriente para el LED D48 indicador de encendido, corriente que se determina por la siguiente formula:

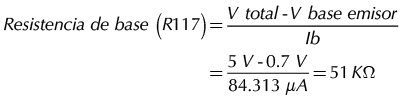
Por otra parte, el control de buzzer se realizó mediante el transistor Q1 (referencia 2n2222A), que tiene un valor característico HFE (β) de 100 y capacidad 500 de mA de corriente entre colector y emisor.
Sabiendo que el buzzer tiene un consumo de 8.43 mA cuando está alimentado con 5 V DC, se procede a calcular la corriente de base requerida para que el transistor trabaje en los modos corte y saturación, así:

Por lo tanto:

Entonces el valor de la resistencia de base (R117) seria:
Ahora bien, los cálculos para el transistor Q4 que controla la iluminación de la pantalla LCD, la cual tiene un
consumo de 5.0 mA (determinados por la resistencia R118 de 1 KΩ) y está alimentada con 5 V DC, serían los siguientes:
Entonces el valor de la resistencia de base de Q4 (R16) sería:


De acuerdo a lo anterior, y teniendo en cuenta el valor de la resistencia R16 más cercano que se encuentra disponible en el mercado, se decide implementar una resistencia de 82 KΩ.
El potenciómetro RV3 de 2 KΩ (recomendado en la ficha técnica de la pantalla LCD) permite realizar la variación del voltaje en el pin VEE de la pantalla, ajustando de esta manera el contraste de los caracteres para su mejor visualización.
En cuanto a la programación desarrollada para el módulo remoto, esta contempla la totalidad de las funcionalidades requeridas para la recepción del carácter identificador del punto corporal impactado y su respectiva interpretación, a fin de asociarlo al puntaje posible de calificación.
Durante la ejecución de una sesión de entrenamiento se registra la sumatoria de la totalidad de los puntajes y el respectivo conteo de la cantidad de impactos ejecutados, de tal forma que con estos dos datos se pueda ejecutar una sentencia de cálculo mediante promedio aritmético.
Figura 5
Diagrama electrónico del módulo remoto
En este mismo programa se contienen las sentencias para gestionar los mensajes que se muestran en la pantalla LCD en relación con los resultados de la sesión de entrenamiento, además de que también recibe las señales del bloque de pulsadores con los que el usuario notifica el inicio o fin de la prueba y el reseteo de la sesión.
El proceso se compone de dos ciclos: un ciclo principal continuo, que contiene las sentencias de declaración e inicialización de variables, la activación de la función de interrupción por llegada de dato a través del puerto RS-232 (con el que se desencadena el ciclo secundario), la activación de las librerías para la gestión de la pantalla LCD y la activación del puerto por el que llegan los datos. Paralelamente, se ejecuta un ciclo secundario (función de interrupción), que está evaluando constantemente la llegada de datos por dicho puerto, ejecutándose en tal caso las sentencias compuestas por una secuencia de 29 condicionales IF, evaluando cada una de ellas un carácter específico, para proceder a incrementar el conteo de impacto en la variable asociada a la zona que corresponda (amarilla, verde, rojo), así como en el contador total de impactos (variable “Divisor”), y acumular el puntaje que corresponda (5, 4 o 1 punto) en la variable “Acumulador”.
Ensamble de la estructura del prototipo
El componente estructural del prototipo corresponde al traje de protección que vestirá el instructor durante una sesión de entrenamiento y a las carcasas o alojamientos para la protección del componente electrónico. La estructura del traje de protección incorpora el arreglo de sensores que detectan los apliques de tonfa en los 29 puntos corporales determinados, para lo cual se concibió un bosquejo elaborado en Sketchup (Trimble, 2020).
Teniendo en cuenta la necesidad de asegurar una estructura que proporcione un nivel de protección adecuado para minimizar los impactos con el bastón, se procedió a contactar a un experto en la manufactura de trajes de protección para conductores de motocicleta, con quien se socializó el bosquejo y los requerimientos funcionales que debe cumplir el traje:
- Amortiguar los impactos de los apliques con el bastón tonfa.
- El traje debe ser de color rojo.
- Debe ajustarse a una talla L para facilitar su postura al usuario.
- El traje debe permitir la instalación interna de 91 sensores en puntos específicos.
El experto contactado confirmó la viabilidad del material seleccionado (lona ReeBag), dado que cumple con características de resistencia a la fricción, impermeabilidad y maleabilidad apropiadas para la elaboración del traje.
En el proceso de confección se valoró la pertinencia de la forma geométrica para las protecciones que amortiguan los impactos, las cuales se manufacturan con láminas de etilvinilacetato (EVA) (Polímeros Nacionales S.A., 2006), de un espesor de 10 mm, que se cosen al traje con recubrimiento en lona ReeBag.
Adicionalmente se definió que para efectos de facilitar la vestimenta el traje se compone de dos secciones, chaqueta y pantalón, y que, en la parte posterior, a la altura de la cintura, se incluye un medio de sujeción entre ambas, para facilitar el paso de cableado de sensores desde las extremidades inferiores hasta el módulo principal, ubicado en la parte alta de la espalda.
El resultado del arbitraje entre los investigadores y el experto en manufactura de trajes de protección permitió la selección de formas geométricas que responden al estilo organ design, las cuales se acomodan a la morfología del cuerpo humano con el objeto de facilitar el movimiento de las extremidades.
Para la instalación de los sensores en la parte interna del traje de protección, se estableció que cada sección del traje estaría compuesta por una prenda exterior, que incluye las protecciones, y una prenda interior acolchonada, en la que se disponen tiras de velcro sobre las que se adhieren firmemente los sensores.
Atendiendo las características de los accesorios utilizados con el traje RedMan (actualmente utilizado en la ESMEB) se procedió a realizar la búsqueda de un medio para el forro del bastón que aumentara la amortiguación de los impactos, definiéndose el uso de una conformación tubular de poliuretano de alta densidad, de 10 mm de espesor, con la que se cubre el cuerpo de la tonfa de uso común en el servicio de policía.
Las pruebas realizadas al traje de protección demostraron una alta efectividad en la amortiguación de los apliques con el bastón en todas las extremidades del cuerpo, confirmándose además que el traje se ajusta a la ergonomía del cuerpo, sin que se presente limitación en la movilidad por la presencia de las protecciones EVA, un inconveniente que se evidenció durante los entrenamientos con el traje RedMan que actualmente se utiliza en la ESMEB.
Para la estructura de alojamiento del módulo principal se realizó un arbitraje de las carcasas existentes en el mercado, en polietileno de alta densidad, que dispongan del espacio interior suficiente para alojar la electrónica. La carcasa seleccionada tiene 8 cm de largo por 12 cm de ancho y 2.5 cm de altura, con una estructura conformada por dos piezas (tapa y caja) que facilita el armado interior de los elementos electrónicos.
De igual manera, se seleccionó una segunda carcasa para proteger la electrónica del módulo remoto, con el mismo criterio de disponibilidad de espacio interior y además con la forma exterior adecuada para el posicionamiento de los bloques de pantalla y pulsadores de interfaz con el usuario.
Las dimensiones de la carcasa para el módulo remoto son: 14 cm de largo por 6.5 cm de alto y 10 cm de ancho, y de igual manera su estructura es de dos piezas, con la salvedad de que la tapa tiene los espacios adecuados para la ubicación de los elementos que componen la interfaz.
DiscusiónEsta discusión de resultados se gesta a partir de las actividades de articulación de los componentes del prototipo, donde se puso a prueba la compatibilidad de los elementos y equipos mediante ensayos y ajustes necesarios para su funcionalidad.
En primera instancia, el proceso de construcción del componente electrónico consistió en el desarrollo del código fuente para la programación de los microcontroladores PIC16F688 (receptores de señales análogas) y PIC16F88 (integrador de datos) que conforman el módulo principal; de igual manera, se desarrolló el código fuente para el microcontrolador PIC16F88 de control para el módulo remoto.
En el desarrollo del código fuente se empleó el software Picc Compiler, que utiliza el lenguaje de programación C y facilita la compilación del programa en lenguaje de máquina para posteriormente grabarlo en los microcontroladores mediante el software PICKit 3, y de manera directa en el circuito.
Los parámetros generales de configuración para los microcontroladores se resumen en la tabla 6.
Tabla 6
Configuraciones generales de programación en los microcontroladores
Microcontrolador
Propósito
Parámetros configurados
PIC16F688
Módulo principal: Receptores de señales análogas
Oscilador: interno a 4 MHz
Conversor A/D: 10 bits
Librería: Float
Puertos RS-232: uno nativo a 4800 baudios, 8 bits y sin bit de paridad.
PIC16F88
Módulo principal: Integración y retransmisión de datos
Oscilador: interno a 8 MHz
Puertos RS-232: Cinco virtuales y uno nativo. Todos a 4800 baudios, 8 bits y sin bit de paridad.
PIC16F88
Control del módulo remoto
Oscilador: interno a 8 MHz
Librería: Float, String, Studio y LCD.
Interrupciones: RS-232 por llegada de dato.
Puertos RS-232: uno nativo a 4800 baudios, 8 bits y sin bit de paridad.
Paralelamente con el desarrollo del código fuente se realizó la elaboración del prototipado rápido, mediante ensamblado en protoboard de los dos módulos (principal y remoto), para confirmar el comportamiento físico de los circuitos.
El bloque de energía para cada uno de los módulos consistió de un arreglo de baterías de ion de litio, un circuito controlador de carga TP4056 y un convertidor de voltaje SX1308, el cual permite elevar el voltaje que entrega el controlador de carga a través del arreglo de baterías, de tal forma que la salida de voltaje se mantenga estable en 5 V DC, independientemente del proceso de descarga de la batería.
El prototipado rápido permitió conocer el consumo de corriente para cada uno de los módulos y realizar los cálculos de autonomía. De acuerdo con las mediciones realizadas, el consumo total del módulo principal, cuando está enlazado el transmisor y receptor bluetooth, se detalla en la tabla 7.
De igual forma, se tomaron las mediciones en las secciones cuando se están transmitiendo datos, registrando en la tabla 8 los siguientes consumos de corriente.
Tabla 7
Consumo total del módulo principal con el bluetooth enlazado
Sección
Consumo de corriente (mA)
Cantidad de secciones
Subtotal de consumo por sección (mA)
Integradora
de datos13.25
1
13.25
Analógica
0.91
4
3.64
Consumo total del módulo principal – bluetooth enlazado
16.89
Tabla 8
Consumo total del módulo principal durante la transmisión de datos
Sección
Consumo de corriente (mA)
Cantidad de secciones
Subtotal de consumo por sección (mA)
Integradora
de datos40.10
1
40.10
Analógica
2.60
4
10.40
Consumo total del módulo principal
– transmitiendo datos50.50
Para calcular la autonomía del módulo principal se asume que trabaja un 70 % de su tiempo transmitiendo datos, y el restante 30 % permanece activado sin transmitir; se conoce adicionalmente que el requerimiento de autonomía es de mínimo ocho horas, y con estos datos se determina la energía requerida:

Entonces:

De la misma manera, se calcula para el modo con TX de datos:

Entonces:

Por lo tanto, la energía total requerida para el módulo principal sería:

Es decir, se requieren 323.336 mA/h para que el módulo principal tenga una autonomía de ocho horas. Por su parte, la eficiencia de las baterías de ion de litio es
aproximadamente del 40 % de su capacidad de energía total, por cuanto el controlador de carga TP4056 suspende el suministro de corriente cuando el voltaje de la batería desciende por debajo de 2.46 V DC, con lo cual se procede a calcular la característica de la batería a incorporar:
En la revisión de baterías disponibles en el marcado se encontró una batería de ion de litio con características: 850 mA/h y 3.7 V DC, que se seleccionó para ser integrada al módulo principal.
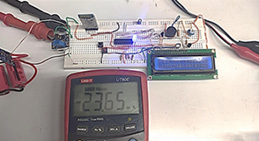
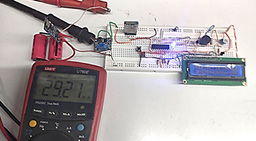
Respecto al módulo remoto, se realizaron mediciones de la misma manera que con el principal (sin y con transmisión de datos), evidenciándose los resultados de la figura 6.
Figura 6
Mediciones de consumo de corriente módulo remoto
Consumo sin transmisión
Consumo de transmisión
de datosEl cálculo de la autonomía para el módulo remoto es:

De la misma manera, se calcula para el modo con RX de datos:

Por lo tanto, la energía total requerida para el módulo principal resulta:

Se aplica el mismo criterio de capacidad útil del 40 % en la batería del sistema, y por lo tanto la característica requerida resulta:

El resultado muestra que se requiere una batería de al menos 550.84 mA/h para lograr una autonomía de ocho horas en el módulo remoto, por lo que se decide incorporar una batería de 600 mA/h.
Integración de los componentes
El proceso de integración de los componentes inició con la aplicación en los sensores piezoeléctricos de una capa de poliestireno para proporcionar mayor rigidez y protección, y sobre este revestimiento se adhirió el velcro.
Seguidamente se realizó la instalación y cableado de los sensores en la prenda interior de la chaqueta y el pantalón del traje de protección.
Respecto al componente electrónico, el proceso de diseño de los circuitos impresos se realizó con el software Proteus, y su manufactura física se realizó con una empresa colombiana especializada en fabricación de PCB.
Con los circuitos impresos se procedió al ensamble y soldadura de componentes electrónicos, y posteriormente se incorporaron conectores tipo hembra y macho para cable ribbon de 20 pines, con los que se concretó la interfaz entre los sensores y el módulo principal, el cual se encajó en la carcasa previamente seleccionada.
De igual forma, para el módulo remoto se realizó el ensamble y soldadura de componentes electrónicos, y posteriormente se instaló la pantalla y pulsadores en la carcasa, para finalmente incorporar la electrónica y ejecutar las conexiones finales.
Pruebas y ajustes del prototipo
Las pruebas finales al prototipo se efectuaron en ambiente controlado, más allá de que durante todo el proceso de construcción se llevaron a cabo pruebas de validación y compatibilidad de los componentes.
También se realizaron varias prácticas de apliques aleatorios de tonfa, registrados manualmente por uno de los investigadores, para contrastar posteriormente los datos de cantidad de apliques por zona en el prototipo, lo que permitió confirmar la efectividad de las funcionalidades de detección, transmisión, interpretación de datos y cálculo aritmético de la calificación.
A continuación, se efectuó una segunda prueba en donde se reinició la sesión de registro de datos y se dispuso que el instructor efectuara movimientos rápidos con el traje puesto, como saltos, trote y movimiento de brazos, sin que se reportaran datos erróneos (falsos apliques de tonfa) en el módulo remoto; sin embargo, se identificó que las medidas del pantalón del traje son muy ajustadas a las medidas del cuerpo del usuario, lo cual dificulta los movimientos corporales.
En la tercera sesión de pruebas se verificó el efecto que los impactos de la tonfa generan sobre el cuerpo humano, para lo cual se utilizó una valoración cualitativa, en la que el instructor vestido con el traje de protección calificó el nivel de dolor causado con cada aplique, concluyendo que en ninguno de los impactos se identificó una manifestación de dolor o molestia.
Como resultado de las pruebas referidas se determinó realizar un ajuste en las dimensiones de la prenda exterior del pantalón, para mejorar las condiciones de movilidad para el usuario, procediendo a contactar al experto en la confección del traje, quien sugirió que la modificación es posible, si bien es necesario realizarla proporcionalmente para las prendas externas del pantalón y de la chaqueta.
Las secciones del traje de protección intervenidas fueron entonces las mangas de pantalón y chaqueta y el tiro del pantalón. Las pruebas de movilidad con el traje modificado evidenciaron una mejora considerable para el instructor al momento de la ejecución de las prácticas con el prototipo.
En la tabla 9 se realiza una verificación de cada uno de los requerimientos funcionales, para valorar su cumplimiento frente a los resultados alcanzados en el desarrollo del proyecto de investigación.
Tabla 9
Comprobación del cumplimiento de requerimientos
No.
Requerimiento funcional
Verificación del cumplimiento
Cumple
1
El prototipo debe detectar los apliques efectuados con la tonfa según las zonas de impacto corporal clasificada.
El arreglo de sensores instalados en los puntos corporales del traje de protección demostró alta efectividad en la detección de los impactos de bastón.
Adicionalmente, se comprobó que el arreglo electrónico concebido para el prototipo (sensores piezoeléctricos, microcontroladores, comunicación RS-232, etc.) permite diferenciar la fuerza de los apliques, creando la necesidad de ejecutar fases siguientes para aprovechar los resultados.
Sí
2
El prototipo debe transmitir el dato de impacto a un módulo remoto, que ejecuta los cálculos matemáticos para calificar la práctica realizada por el discente.
Las pruebas realizadas al prototipo demostraron que los transceptores HC-05 con tecnología bluetooth ejecutan la transmisión de los datos entre el módulo principal y el remoto sin evidencia de perturbaciones o demoras, y que el módulo remoto ejecuta las operaciones matemáticas eficazmente.
Sí
3
El prototipo debe sostener su capacidad de funcionamiento con medios de almacenamiento de energía.
Los cálculos de autonomía demostraron que el prototipo tiene una autonomía de funcionamiento de ocho horas aproximadamente, soportado con baterías recargables de ion de litio independientes para cada uno de los módulos (principal y remoto).
Sí
4
El prototipo debe contar con una estructura que disminuya el eventual daño corporal causado por los apliques de tonfa.
Las pruebas controladas realizadas al traje de protección, confeccionado de manera asistida con un experto, y el recubrimiento integrado al bastón tonfa, demostraron que los impactos que recibe el usuario al momento de los apliques no causan perturbaciones corporales en el cuerpo.
Sí
5
El prototipo debe otorgar el siguiente puntaje para cada zona corporal de impacto:
Zona roja: 1 punto.
Zona amarilla: 4 puntos.
Zona verde: 5 puntos.
El cálculo de puntaje final se ejecuta mediante el promedio aritmético de las calificaciones obtenidas durante el tiempo de prueba.
En la programación desarrollada para el microcontrolador del módulo remoto se incluyeron las sentencias suficientes para discriminar las señales y asociarlas a las zonas de impacto, a fin de acumular el puntaje establecido para cada una de ellas.
También se incluyó una funcionalidad de calificación mediante promedio aritmético que se muestra al usuario cuando determina que ha finalizado la prueba.
Sí
6
El prototipo debe descalificar al discente cuando se efectúe un aplique de tonfa en la ingle.
En la programación del módulo remoto se establecieron las sentencias que muestran al usuario la descalificación de la prueba en razón a este aplique detectado.
Sí
7
El módulo remoto del prototipo debe contar una interfaz que muestre los resultados numéricos de la calificación, facilitando al usuario medios para determinar el momento de inicio y final de la prueba y una opción de reinicio y borrado del puntaje.
La pantalla LCD 16x2 integrada en el módulo remoto muestra con claridad los resultados de la calificación.
Los dos pulsadores incorporados a este módulo (inicio-fin, reseteo) evidenciaron suficiencia para la manipulación del prototipo por parte del usuario, quien puede iniciar o finalizar la sesión en cualquier momento. Cuando se finaliza la prueba, el prototipo muestra el resultado en la pantalla y permanece allí hasta que se notifica un nuevo inicio de prueba, lo que al mismo tiempo borra el resultado anterior.
Sí
8
La estructura externa del traje de protección debe ser de color rojo.
La totalidad de las prendas elaboradas para el traje protección del prototipo se elaboraron en lona ReeBag de color rojo, asegurando una alta visibilidad del traje para los usuarios durante las pruebas.
Sí
ConclusionesEl prototipo de traje para instrucción en la aplicación del uso del bastón policial tipo tonfa puede constituir una herramienta didáctica eficaz para valorar cuantitativamente las prácticas de los discentes de la Dirección Nacional de Escuelas (2018), vinculados por programas académicos de formación, actualización y entrenamiento.
La tecnología integrada para la detección y gestión de los puntos de impacto en el prototipo tiene condiciones físicas y electrónicas que facilitan su integración en un traje Redan, como forma de mejorar las condiciones de protección.
La innovación en productos propuesta en el presente trabajo tiene importantes y novedosas características funcionales que difieren de los trajes de protección y evaluación existentes en el mercado, lo cual implica que la institución debe contemplar una gestión de patente que lo proteja y posibilite su eventual aprovechamiento.
Durante el proceso de validación de las funcionalidades se identificó la necesidad de ejecutar siguientes fases de escalamiento, que posibiliten el aprovechamiento de los datos que arroja el traje sobre la presión del impacto. Así, es importante contemplar una segunda fase de escalamiento del presente proyecto, con miras al aprovechamiento de la funcionalidad existente relacionada con la intensidad del impacto, de tal forma que se tenga la posibilidad de incluir esta variable en los resultados de la sesión.
En la segunda fase de escalamiento se puede considerar también el desarrollo de un sistema de información en un ordenador, al que llegarían los datos mediante el mismo enlace bluetooth, para de esta manera aumentar la eficiencia en las métricas asociadas a la práctica de apliques con bastón policial.
Es pertinente considerar pues la posibilidad de incorporar el arreglo de sensores y los demás bloques del módulo principal en un traje de protección RedMan que necesariamente debería modificarse estructuralmente para proteger los sensores. También es pertinente que en el escalamiento se contemple la inclusión de un desarrollo que proteja y evalúe los eventuales apliques en el área de la cabeza y cuello del instructor.
ReferenciasCongreso de la República de Colombia. (29 de julio de 2016). Código Nacional de Policía y Convivencia. Ley 1801. Congreso de Colombia .
Congreso de la República de Colombia. (7 de febrero de 2006). Régimen Disciplinario para la Policía Nacional. http://www.secretariasenado.gov.co/senado/basedoc/ley_1015_2006.html
Dirección General Policía Nacional de Colombia. (23 de junio de 2017). Reglamento para el uso de la fuerza y el empleo de armas, municiones, elementos y dispositivos menos letales, por la Policía Nacional. Resolución 02903 de 2017. Policía Nacional de Colombia.
Dirección Nacional de Escuelas. (2018). Guía práctica del sistema táctico básico policial. Dirección Nacional de Escuelas, Vicerrectoría de Educación Continua. Oficina de Planeación - Policía Nacional.
García, C. F. (2005). La investigación Tecnológica. México D.C.: LIMUSA.
Innotex. (1 de septiembre de 2020). Traje antifricción. https://innotexprotection.com/es/ropa-de-proteccion/
Labcenter. (15 de enero de 2020). Proteus. https://www.labcenter.com/
Microchip. (1 de enero de 2005). MIcrochip PIC16F88. https://ww1.microchip.com/downloads/en/devicedoc/30487c.pdf
Microchip. (1 de enero de 2021). PIC16F688. Features. https://www.microchip.com/wwwproducts/en/PIC16F688
OCDE. (2015). Frascati Manual 2015: Guidelines for Collecting and Reporting Data on Research and Experimental Development, The Measurement of Scientific, Technological and Innovation Activities. Fundación Española para la Ciencia y la Tecnología, FECYT. https://doi.org/10.1787/9789264239012-en
Polímeros Nacionales S.A. (6 de junio de 2006). Hoja técnica EVA18. Polnac.com. https://acortar.link/GL7Ycf
Smelpro.com. (25 de junio de 2019). Qué es un microcontrolador. https://smelpro.com/blog/que-es-un-microcontrolador/
Trimble. (10 de enero de 2020). SketchUp. https://www.sketchup.com/es
Valbuena, J. M. (3 de febrero de 2021). Instructor de Sistema táctico Basico ESMEB. (J. Berrio Pino , M. Niño, & J. Ojeda, Entrevistadores)